
The Challenges the Test Engineers Face in Real-Time Testing Applications
As products and systems become more and more complex, the testing also is facing more and more challenges. In response to these challenges, in separate real-time testing applications, real-time test systems are focusing to produce test systems that resemble a blended set of requirements.
The emergence of model-based dynamometers is a typical example of this trend. The traditional dynamometer test systems consist of a real-time test application. It uses proportional integral derivative (PID) control algorithms to produce varying torque and speed conditions for the UUT. To exercise and validate the device, the test system would apply static stimulus profiles to the PID controllers as well as the UUT. The newly model-based dynamometer systems use models to implement advanced control algorithms as well as generate dynamic stimulus profiles for the test system.
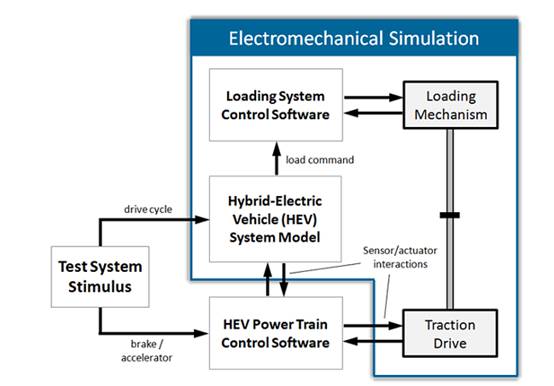
In an application of hybrid-electric vehicle (HEV) power train systems, real-time test requirements are needed. During their research and development of HEV power train systems, engineers used the NI real-time testing platform to create a specialized HIL test system. Instead of providing a completely electrical simulation of the vehicle’s sensor and actuator interactions with the ECU, they replaced the power train’s traction drive software models with the actual electromechanical components. They then connected them in the loop with the software models that simulated the rest of their vehicle to achieve a more accurate and flexible test system.
Because a physical component had been added to the simulation, they needed to add a loading mechanism for the traction drive so that the simulation could command its loading conditions. The HIL simulator provides the simulated load values to the loading mechanism controller, which applies physical load to the traction drive via mechanical coupling. When implementing this specialized HIL test system, engineers had to create both an HIL simulator and a dynamometer-based loading system that worked together to provide an electromechanical simulation of the HEV power train.

{kind=link}
This requirement can be also seen in dynamometers. Once, some Engineers used the NI real-time testing platform to produce such a system using the form of a six-wheel independent chassis dynamometer. To adequately test their vehicle, engineers needed the dynamometer to be able to produce test conditions that could simulate vehicle maneuvers over varying terrain. Furthermore, the system had to preserve the terrain transitions from wheel-to-wheel as the vehicle executes maneuvers.
To implement this test system, these engineers had to combine their experience in building both dynamometers and HIL simulators, creating a traditional dynamometer test system with additional features more commonly found in HIL test systems. Specifically, they added the ability to execute complex models deterministically to provide the dynamic stimulus generation of the six correlated speed/torque profiles and to implement the advanced control necessary to achieve such a task.